

Canbus Haberleşme Protokolü Nedir ?
CANBUS haberleşme protokolü endüstride en çok kullanılan protokollerden biridir. Bu protokole hakim olmak ve bu protokolü öğrenmek size çok fazla katkı sağlayacaktır. Alışılmış haberleşme topolojisindeki Master-Slave ilişkisi bu haberleşme protokolünde gözlenmez. CANBUS mesaj önceliğine dikkat eden bir protokoldür. Bu CANBUS serisinin ilk yazısında sizlere CANBUS’un fiziksel yapısı ve fiziksel hattının özelliklerinden bahsedeceğiz.
Haberleşme protokollerini OSI katmanı üzerinde daha net gözlemleyebiliriz. OSI Haberleşme Katmanları hakkında daha önce bir yazı yayınlamıştık. OSI katmanları Birçok haberleşme protokolü bu modellemeyi kullanır. Bunun sebebi üretilen farklı model ve marka cihazların birbiri ile doğru iletişim
kurabilmesini sağlamaktır. The Controller Area Network (CAN) protokolü OSI modelin Data Link
ve Physical Layer kısımına karşılık gelir.

Physical ve Data Link katmanı Logical Link Control (LLC), Medium Access Control
(MAC), Physical Signaling, Physical Medium Attachment, Medium Dependent Interface
kısımlarından oluşur.
Logical Link Control (LLC): Aşırı yük durumu, mesaj filitrelemesi ve kurtarma yönetimi gibi
olayları yönetir.
Medium Access Control (MAC): Veri kapsülleme, Frame coding, Hata tespiti, seri hata tespiti
gibi durumları gerçekleştirr.
Physical Medium Attachement(PMA) ve Medium Dependent Interface (MID): Fiziksel
katmanın iki kısmını oluşturur.
Görüldüğü gibi , Data Link ve Physical katmanında yer almaktadır. CANBUS hattının yapısı aşağıda gösterildiği gibidir.
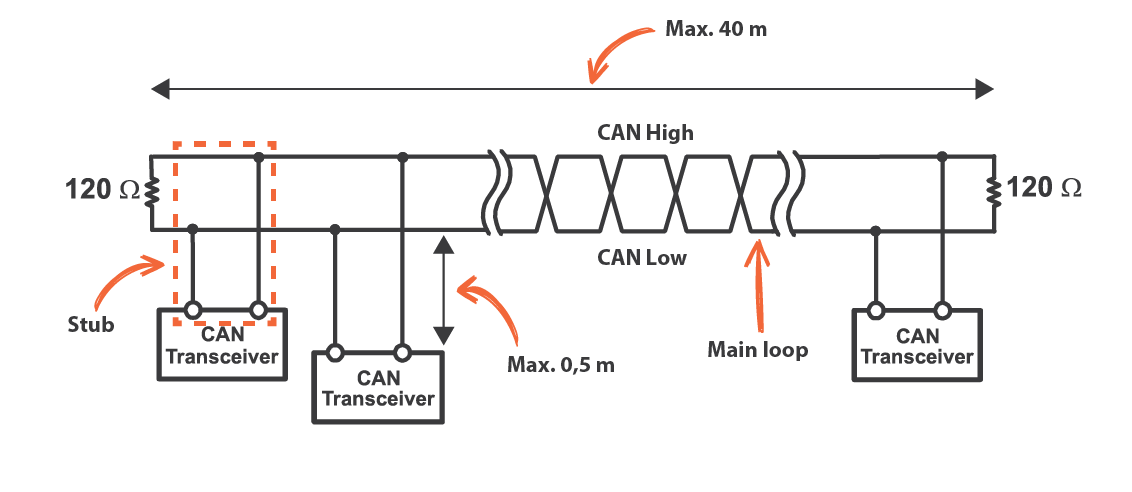
CANBUS HATTININ ÖZELLİKLERİ
CAN veriyolu CANH ve CANL diferansiyel data hattından oluşur.

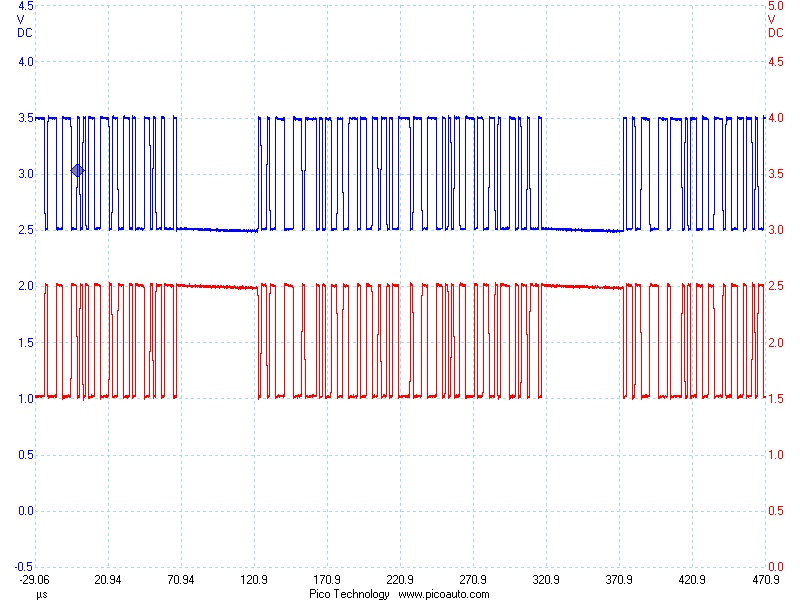
CAN IDLE modda ise CANH ve CANL hatları 2.5V seviyesindedir. Data transfer edilmeye başladığı anda CANH hattı 3.75V seviyesine yükselirken, CANL ise 1.25V seviyelerine kadar düşmektedir. Bu durumda her iki sinyal seviyesi arasında 2.5V görülmektedir. Buradaki iletişim iki veri yolu hattındaki voltaj farkına dayanır.
NOT: Burada Logic durumlara nasıl karar verdiğimiz ile ilgili bir parantez açmak istiyorum, bu açıklama bir sonraki paragrafı anlamanıza yardımcı olacaktır.

Hattın Logic durumuna karar verirken yukarıdaki tabloyu baz alıyoruz buna göre Y sonucu bize hattın Logic durumunu veriyor. Örneğin IDLE durumunda her iki sinyal 2.5V civarında, bu durumda her ikisinin 1 ^ 1 durumu bize hattın Logic 1 olduğunu göstermektedir.
CAN IDLE modda ise bu durum Logic olarak “1” durumuna denk gelmektedir. Bu durumda CANH = 2.5V iken CANL = 2.5V olmaktadır. Bu iki sinyal arası farka baktığımızda 0V olmaktadır. Bu sinyal “recessive” olarak adlandırılır. Diğer durumda ise Logic olarak “0” durumuna denk gelmektedir. CANH = 3.75V ve CANL = 1.25V olduğunda Vdiff = 3.75-1.25 = 2V olmaktadır. Bu durum ise “dominant” state olarak adlandırılmaktadır.
Canbus hatta dominant bir bit gördüğü zaman, bu mesajı daha önceliklendirir ve bu mesajın ilk önce ulaşmasını sağlar. Bu cümleyi kurduğumda, kim bu CANBUS nasıl karar veriyor buna diyebilirsiniz. CANBUS’dan bir bilgisayar gibi bahsetmektense asıl işi yapan şeyin ne olduğunu ifade etmeyi burada yerinde buluyorum. Bu yüzden de burada ufak bir parantez açmayı uygun buldum.

MCU ünitesi içerisinde CAN hattını yönetebilmek için, CAN Interface içerir. Bu interface’den çıkan sinyalleri genellikle CAN-TX ve CAN-RX olarak işlemci üzerinde gözlemleriz. Bu sinyaller dijital olarak gönderilebilir ancak yukarıda bahsettiğimiz gibi CANhaberleşmesi için diferansiyel sinyal çiftine ihtiyaç duyarız. MCU bize bu sinyalleri sağlayamaz. Bunun için CANBUS hattında bir Tranceive’a ihtiyaç duyarız.

İşlemcinin CAN-TX ve CAN-RX pinlerinden çıkan sinyal, single ended bir sinyalken. Tranceiver ucundan çıkan sinyal bu sinyali Differantial sinyale çevirir. İkisinin farkını aşağıdaki şemadan gözlemleyebilirsiniz.

Canbus sinyalleri veri hattında aşağıdaki gibi gözlemlenir :
Bu yazımızda sizlerle, temel olarak CANBUS nedir, konusuna değinmiş olduk. Bir sonraki konuda CANBUS mesajlarının yapısını, iletim hızının hesaplanmasını inceleyeceğiz.